Direction-finding is the practice of knowing the transmission direction of a received signal. It supports everything in a system, from tracking wildlife to aviation and nautical navigation. Bluetooth added the new optional direction-finding core specification in its latest Bluetooth 5.1. This new feature enables Bluetooth devices to know the direction of any signal broadcasted from another Bluetooth device. It is also capable and can radically enhance Bluetooth location services solutions. The feature of direction finding supports two techniques. These techniques are; the Bluetooth AoA (angle of arrival) and the Bluetooth AoD (angle of departure).
At MOKOBlue, we create and provide multiple Bluetooth beacons that support the new Bluetooth directions finding features with diversified designs for independent development. Our team is dedicated to developing and customizing various hardware and software designs according to customer needs.
The working principle of Angle of Arrival and Angle of Departure
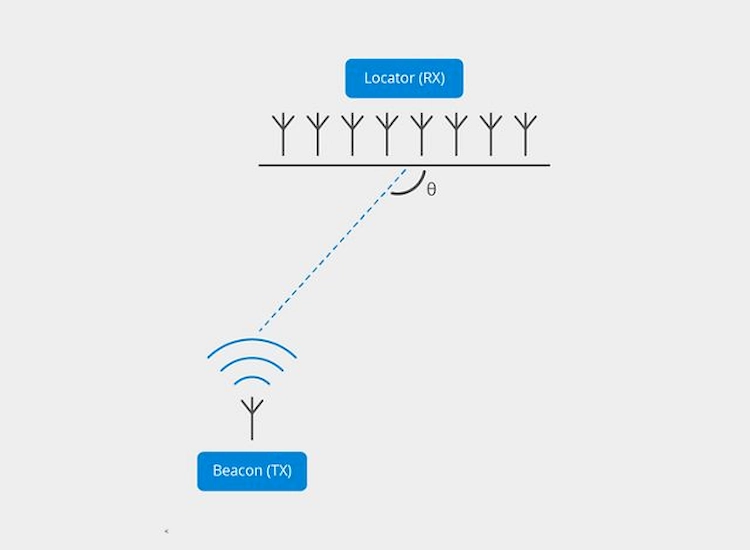
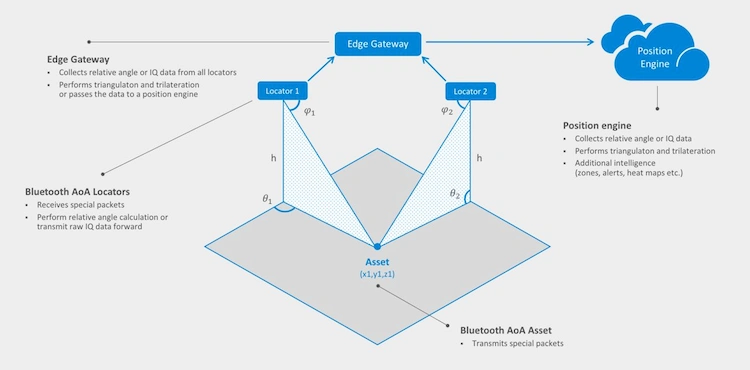
Angle of Arrival (AoA)
- An asset broadcasts(TX) its location to an AoA locator, such as a wireless access point (AP), connected light, or smart light fixture
- The locator measures the Angle of the arrival of the signal
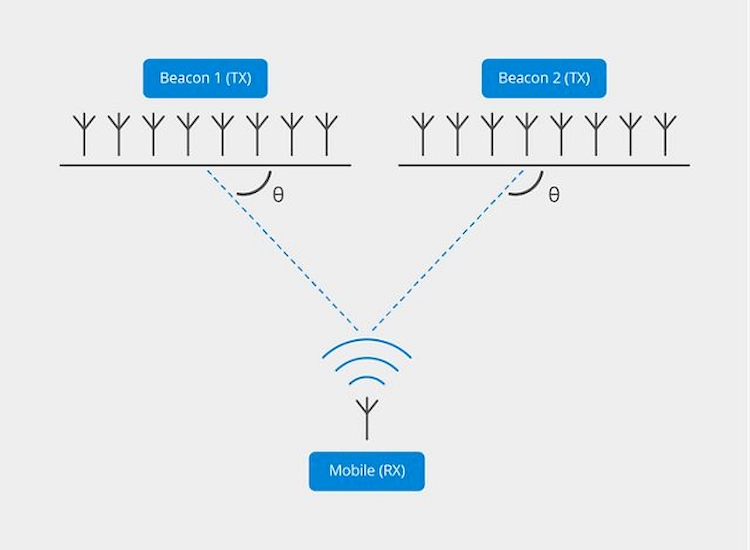
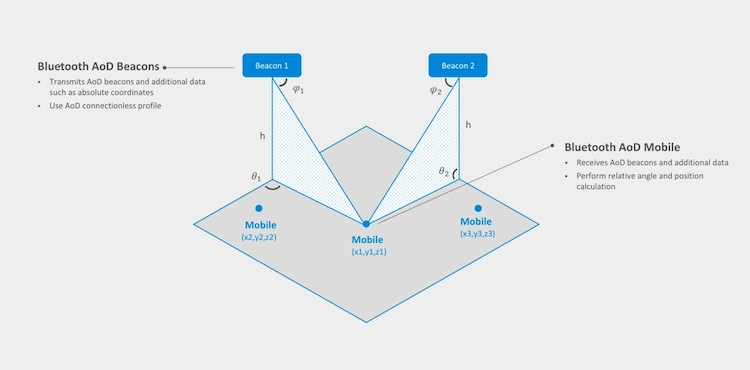
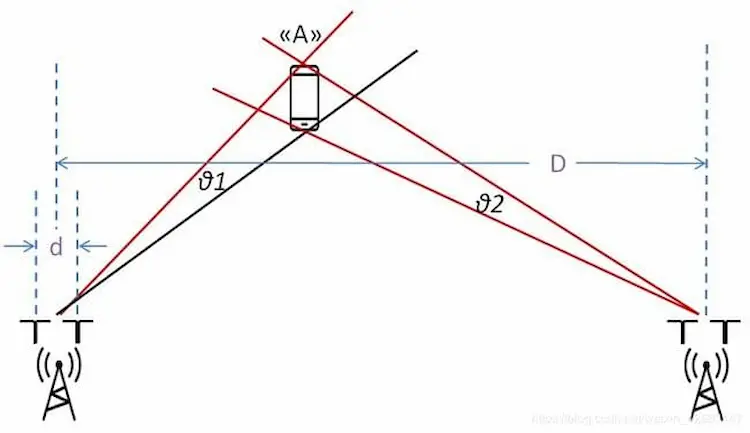
Angle of Departure(AOD)
- Beacons transmit AoD information, such as coordinates, through multiple antennas
- Mobile devices, including smartphones, receive the beacons and calculate their location
Designs Considerations of Bluetooth AoA (Angle of Arrival)
• Only a single antenna is required. It can be of low power and concurrently supports other functionality of BLE
• Only 4 x 4 or 3 x 3 switches and antenna rays are needed by the locators
• All angle readings are processed by the Bluetooth AoA gateways. They also determine the location of the device by communicating with an asset management system in the cloud
Designs Considerations of Bluetooth AoD (Angle of Departure)
• Only 4 x 4 or 3 x 3 switches and antenna rays are needed by the beacons
• AoD algorithms must be supported by devices such as smartphones
• The location services system must be familiar with the coordinates of the beacon
Solutions of the New Bluetooth Direction Finding Feature
Besides positioning and key proximity applications, the Bluetooth direction-finding feature also has other solutions. They include;
Item Finding Solutions
In the user’s experience, item-finding solutions experience a considerable bump. When smartphone sellers incorporate a Bluetooth AoA direction finding feature into their phones, item finding solutions can control the directional data. This implies that not only will they be able to determine the closeness of a misplaced item, but they will also know its exact location. Thus, the Bluetooth direction finding feature eliminates the assumption requisite when searching for lost items.
RTLS Solutions
RTLS solutions can implement the direction-finding feature to enhance the Bluetooth AoA accuracy of a location down to centimeter-level when deployed in the right surroundings. RTLS with a direction-finding feature allows a factory to easily track the position and flow of materials with enhanced precision. Moreover, it also alerts employees whenever they get close to dangerous working zones.
PoI Information Solutions
When the Bluetooth AoA direction finding feature is added to smartphones, the PoI information solutions primarily benefit from this. For instance, various exhibits with associated beacons in a museum can use the PoI information application. Users can access the PoI information application from their smartphones and know all the available exhibits in a room. The application allows the user to select the most opportunistic exhibit to receive extra information regarding that particular exhibit. Users can use the direction-finding support to acquire more information regarding a particular item by just pointing their smartphones to that specific exhibit.
IPS Solutions
The direction-finding feature is also applied in IPS solutions. For instance, in positioning systems, the new Bluetooth direction feature can be used to navigate fans in a big stadium right on their seats. IPS solutions with the direction finding feature require fewer locator beacons to obtain better accuracy. This brings additional effectiveness to deployments. Moreover, the accuracy achieved provides incremental information and an understanding of consumer and product interaction.
Bluetooth 5.1 AoA Location Service Realization Theory
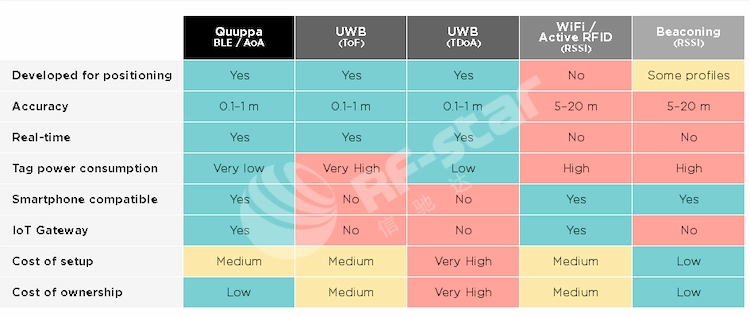
Summary of the Indoor Positioning Technology
Indoor positioning has several solutions. They include; UWB, Wi-Fi, BLE beacon, and BLE AoA. UWB has an accuracy range of 0.1m to 1m, while Wi-Fi and BLE beacons have a larger error. Their accuracy range is between 5m to 20m.
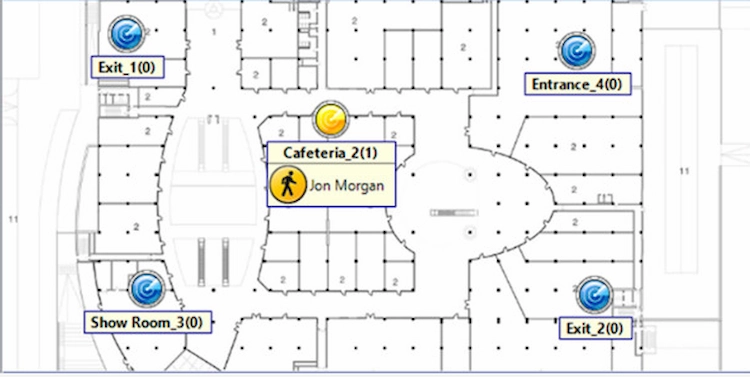
Indoor Positioning Theory Analysis
The indoor positioning system draws a real scene’s architectural modeling, sets up the receiver router in the indoor location, and marks the matching position on the modeling map. All the wireless signals are transmitted via a smartphone or a beacon module. After receiving the wireless signals, the receiver router installed in a fixed point authenticates the beacon’s position area range.
After confirming its position area range, various antennas can measure the beacon’s signal arrival angle. This can be calculated by combining the beacon’s accurate position and the triangulation positioning.
Triangulation
Triangulation refers to measuring a beacon’s position using two AoA data sets. One AoA data can be measured using two sets of antennas. On the other hand, the position of a device can be measured using two sets of AoA data.
Theory of Measurement
Frequency
The ISM band in Bluetooth devices starts from 2.40 GHz to 2.41 GHz. Bluetooth has 3 broadcast channels that include 37, 38, and 39. In the core specifications of Bluetooth v5.x, the extensive Bluetooth Low Energy broadcast can be transmitted in any channel from 0 to 39. Thus, all beacons with Bluetooth version 5.1 can effectively function on any Bluetooth channel.
Phase
All wireless signals are continuous in the air. In the range of frequency, the RX receiver reverses modulation and collects the signal of a 0~2π wave cycle.
AoA calculation
Imagine when a fixed-frequency BLE beacon signal is transmitting in an open space. The RX receives a null phase difference when the receivers are on the same radius and TX end during a particular time. Nevertheless, a phase receiver is acquired when the RX receiver is in a position with an incompatible radius, during a particular time.
AoA Measurement Error
There are two angles of a two-dimensional plane, but there is a circle trajectory with a radius of α in actual three-dimensional coordinates. Although the AoA receiver knows the signal of a beacon when it is on the circle’s trajectory, it cannot determine whether they are on the circle or not. During this time, the coordinate location point of the beacon is confirmed by an orthogonal antenna array.
Antenna arrays are set through positioning and by reducing the number of deployed receivers. Below is an illustration of deploying standard antenna arrays with a Bluetooth AOA development kit.
Deployment of AoA Software in Bluetooth 5.1
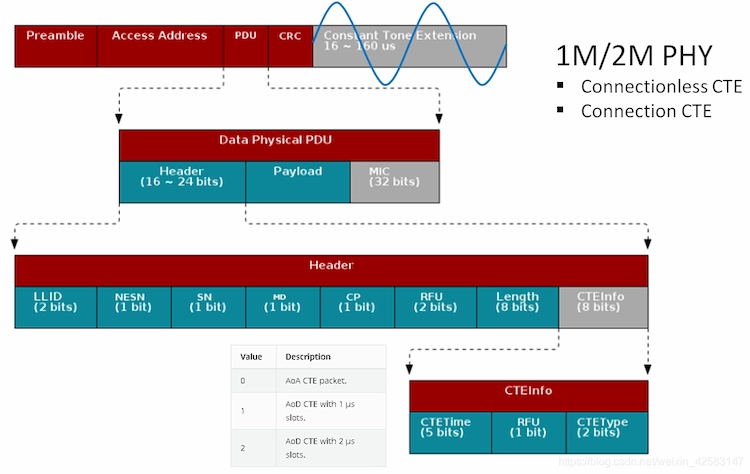
Bluetooth 5.1 is developed with AoA protocol specifications in the logical link layer. The Angle of Arrival and the Angle of Departure can support both the broadcasting and connection modes and work under 1M or 2M regular PHY. The following are the requirements of the data transmission format
• A PDU data packet has standardized AoA/AoD specifications
• The CTE is the AoA/AoD data packet extension, and its period is 16 μs – 160 μs.
• The signal modulation of 250 kHz is available on a carrier wave without CRC validation and whitening.
• The RX receiver uses a signal to work out the phase difference and sample the signal I/Q value at a specific time.
Challenges of Bluetooth AoA Designs
Signal Reflection Interference
The receiver RX in a real scene receives its reflection signal or that of other Angles of Arrival and beacon signals. Moreover, CTE-extended data packets are carried by s the reflection signal although noise signals must first be eliminated.
Compensation Switching Time
Various TF antennas are controlled by the RF core. Apart from the signal transmission time in the air, the RF’s switching time must always be compensated.
Angle Value Error
An algorithm is required to minimize the error since the measurements must have an error. Mostly, the error range is between 3% ~ 5%.
Tips to Maximizing the Accuracy of Bluetooth AoA
Bluetooth Angle of Arrival (AoA) works out the beacon’s azimuth and elevation angles using the phase difference of a signal hitting various antennas. Physical aspects and the process of transmitting signals affect the accuracy of AoA. This accuracy varies from a few centimeters to around a meter.
Some of the strategies of maximizing the accuracy of Bluetooth AoA are;
a) Always keep metal objects far from the locators. Better accuracy can be achieved by adding boxing above the locators. This is done to keep off any metal objects near the locators.
b) Arrange the locators on every side of a beacon. It is essential to have locators evenly spaced around all sides of the beacon. Poor accuracy is realized when there is a large angle between the beacon and the locator.
c) The best accuracy is attained when the beacon and the locator are closely positioned. Always drop the locators down with tall ceilings to obtain better accuracy. Also, remember not to drop the locators too far since poor accuracy can be realized when there is a large angle between the locator and the beacon.
d) Among the X, Y, and Z locations, the worst accuracy is realized on the Z-axis since all locators are often placed at similar heights.
e) Better accuracy is achieved when a line of sight exists between the locator and the beacon. Consider placing beacons on top of items like pallet loads and locators on the roof or ceiling to create a line of sight between the two.
f) Add extra locators in the exact location to create more location angles. These location angles can be used to calculate an improved accuracy of the beacon’s position.
g) You can also filter over time to average more data. This is achievable without stressing the location engine, although latency is increased when receiving updates of the location.
h) Variation in accuracy relies on the orientation of a beacon. In controlled scenarios, you can consider arranging and fixing the orientation of a beacon to enhance accuracy in a specific direction.
i) It is essential to have an accurate site and anchor measurement—poor accuracy is attained due to inaccurate initial measurements.
Advantages of MOKOBlue’s Bluetooth AoA Positioning Technologies
• They have an average accuracy of between 0.1 to 0.5 meters
• They enhance the 5-meter accuracy of the initial Bluetooth low-precision by almost 10 times
• They have a high refresh rate
• These technologies support Bluetooth version 5.1
• They are compatible with various Bluetooth tags such as beacons, smartphones, watches, bracelets, and many others
• They consume low power
• They have the capabilities of downlink broadcasting and IoT anchor
MOKOBlue Beacons Product Features
1. Nordic nRF52 Series SoC
2. Supports Bluetooth version 4.2
3. Compatible with Bluetooth version 5
4. Compatible with Google Eddystone and Apple iBeacon
5. Available for Arduino Bluetooth iOS
6. Has unique SDK and APP configurations
Some of the Bluetooth beacons available at MOKOBlue are;
a) H6 Light Sensor Beacon – It is assembled with an ultrasonic welding structure and is compatible with the standard Bluetooth version 4.2. Besides, it is integrated with a 3-axis accelerometer and light sensors. The H6 light sensor beacon is the most ideal for POI information solutions.
b) W6 Bluetooth Wristband Beacon – This Bluetooth wristband beacon is compatible with the standard Bluetooth Version 5.1. It is specially built for use cases such as item-finding solutions, flow management, etc.
c) H7 Helmet Beacon – It is a durable BLE beacon with a high waterproof level of IP67. The beacon is shockproof and resistant to high temperatures. Hence, it is an effective application for RTLS solutions as it can work in harsh surroundings, such as warehouses, factories, tunnels, construction sites, and more.
d) M1 Coin Beacon Tag – It is a small and portable Bluetooth beacon tag hardware that weighs 5.4 grams. Moreover, it is built with an optional 3-axis accelerometer sensor that enables it to analyze the user’s behavior. The M1 coin beacon tag is the best choice for IPS solutions.